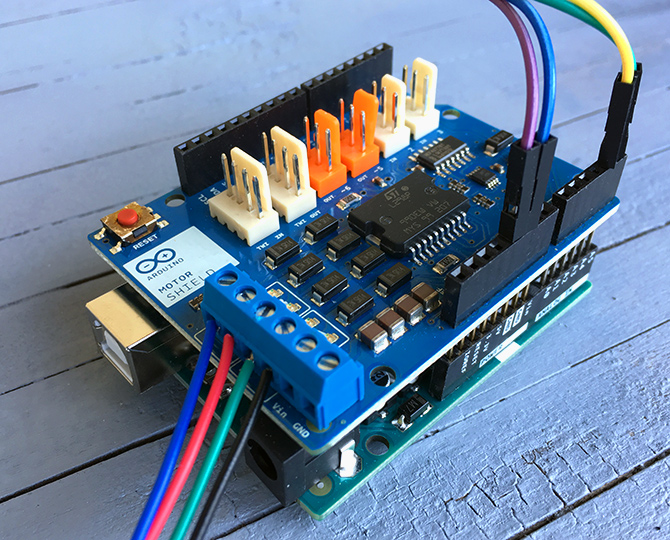
Per poter utilizzare AstroFocus servono diversi software. Come prima cosa dovrete scaricare, compilare ed installare sul vostro Arduino il firmware.
AstroFocus Firmware
Versione 5.0.1.0 per Arduino
Per compilare il firmware e scriverlo su Arduino vi servirà una IDE, scaricabile qui:
Arduino IDE
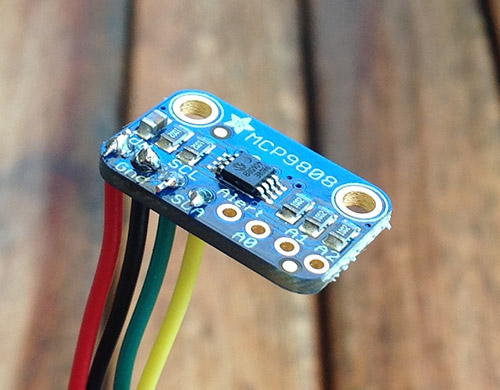
Al fine di permettere il funzionamento del sensore di temperatura è necessario intallare nell'IDE la libreria per Adafruit MCP9808. Per farlo selezionate la voce "Menage Libraries..." dal menu "Tools" dell'Arduino IDE e digitate nella casella di ricerca "MCP9808", quindi selezionate la voce "Adafruit 9808 Library" ed installate la versione più aggiornata.
Vi servirà poi il driver ASCOM di AstroFocus 5 che è scaricabile gratuitamente da qui:
AstroFocus ASCOM Driver
Versione 5.0.1.0
Si tratta di un driver progettato per la piattaforma ASCOM 6 che vi permetterà di utilizzare AstroFocus 5 con qualunque programma compatibile con questa piattaforma.
Se volete semplicemente far muovere il motore potreste utilizzare AstroFocus HC:
AstroFocus HC
Versione 1.2.1.1
Quest'ultimo programma non è necessario per il funzionamento di AstroFocus 5, ma può essere utile per far muovere il motore in modo "manuale". Si tratta di un client ASCOM quindi è in realtà in grado di pilotare non solo AstroFocus 5, ma qualunque fuocheggiatore dotato di interfaccia ASCOM.
Il funzionamento di AstroFocus è molto semplice. Accedendo alle impostazioni del driver ASCOM prima della connessione è possibile selezionare la porta COM a cui Arduino è collegato. Se invece la finestra delle impostazioni viene richiamata con la connessione già in corso appare una finestrella dalla quale è possibile impostare numerosi parametri.
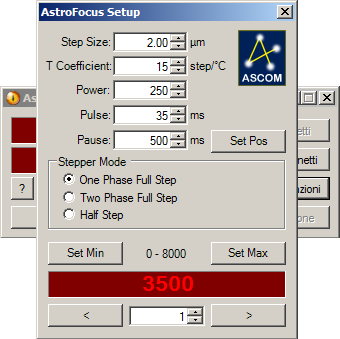
Questo parametro indica lo spostamento del piano focale per ogni passo del motore. Per calcolarlo è possibile misurare di quanti millimetri si sposta il fuocheggiatore effettuando 1000 passi.
Questo è il coefficiente di dilatazione del telescopio. Misura il numero di passi necessari per rimettere a fuoco per ogni grado di variazione della temperatura.
Questo valore indica la potenza applicata al motore con un valore che può variare tra 1 e 255. Se la potenza applicata è troppo poca il motore potrebbe non muoversi o perdere alcuni passi, se è troppa il motore potrebbe surriscaldarsi.
Questo valore indica la durata in millisecondi di ciascun impulso inviato al motore. Se questo valore è troppo basso il motore potrebbe perdere dei passi, se è troppo alto il motore potrebbe essere eccessivamente lento.
Al termine di una sequenza di impulsi il motore viene mantenuto alimentato ancora qualche istante per stabilizzarne la posizione. La durata di questo periodo di stabilizzazione è determinata da questo parametro.
Questo valore indica se il motore deve essere mosso per passi interi o per mezzi passi.
Questo pulsante permette di impostare la posizione zero del fuocheggiatore.
Questo pulsante permette di impostare la posizione massima del fuocheggiatore.
Questo pulsante permette di impostare manualmente il valore corrispondente alla posizione attuale del fuocheggiatore.
|